-17.png)


本次v0.5.4版本更新聚焦优化排布算法,为用户提供了设置更多、更详细的排布目标和排布参数的功能。希望以此为用户带来更好的自动楼梯排布体验,用户能够得到更符合心意的楼梯排布结果。
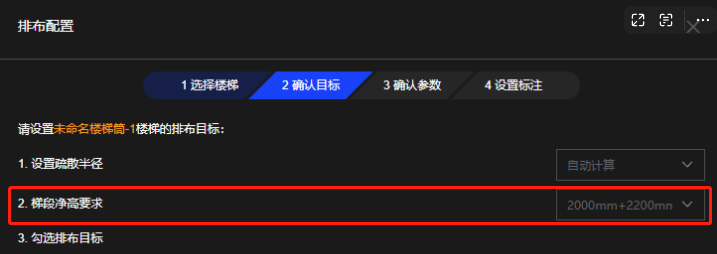
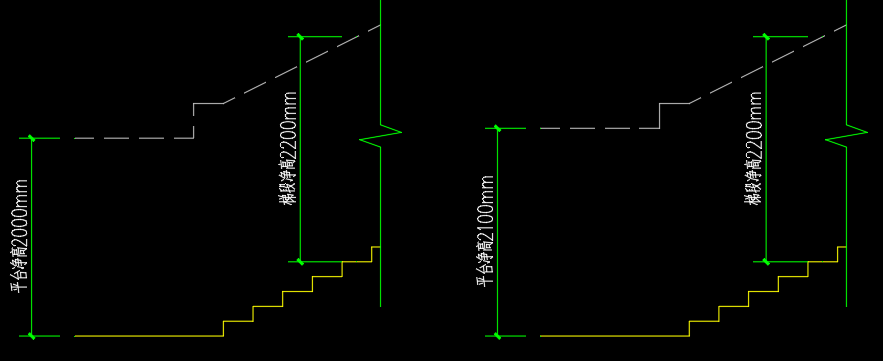
图2-【2000mm+2200mm】与【2100mm+2200mm】示意
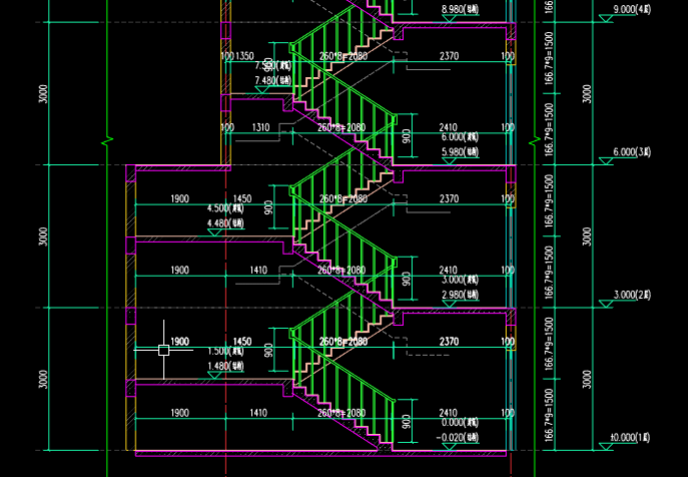
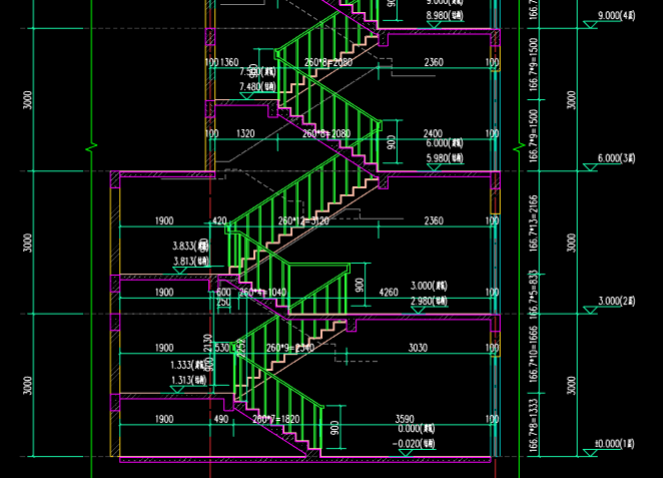
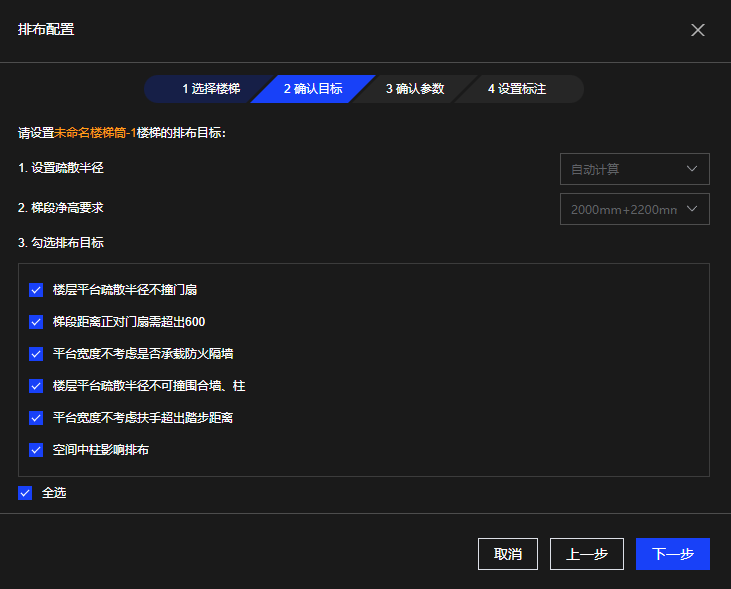

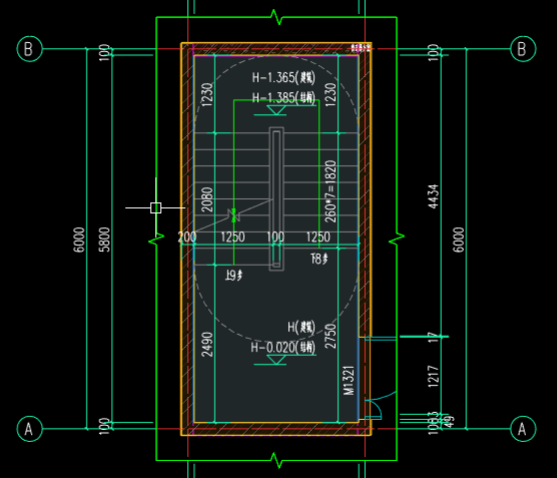
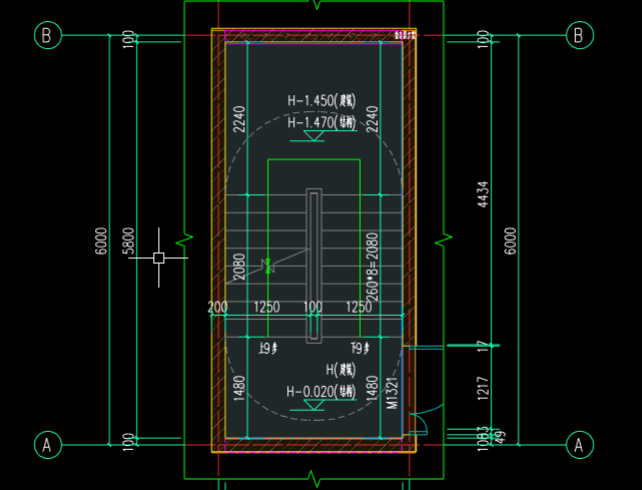
图8-排布时考虑门扇对疏散半径的影响(图左)、排布时不考虑门扇对疏散半径的影响(图右)
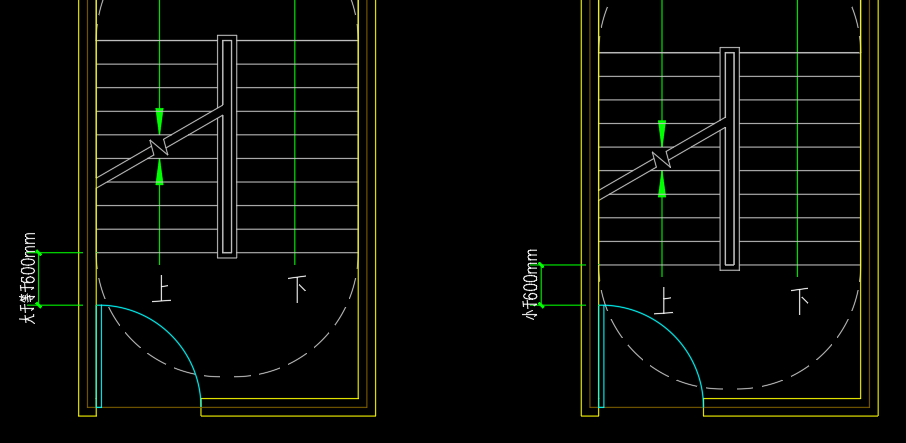
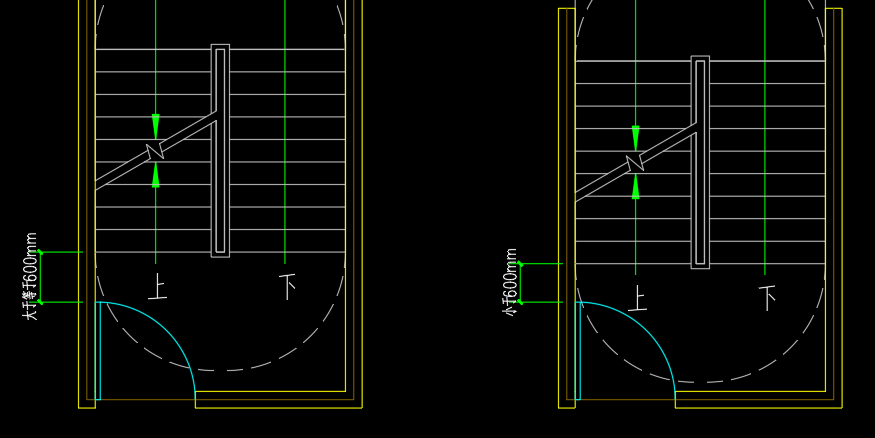
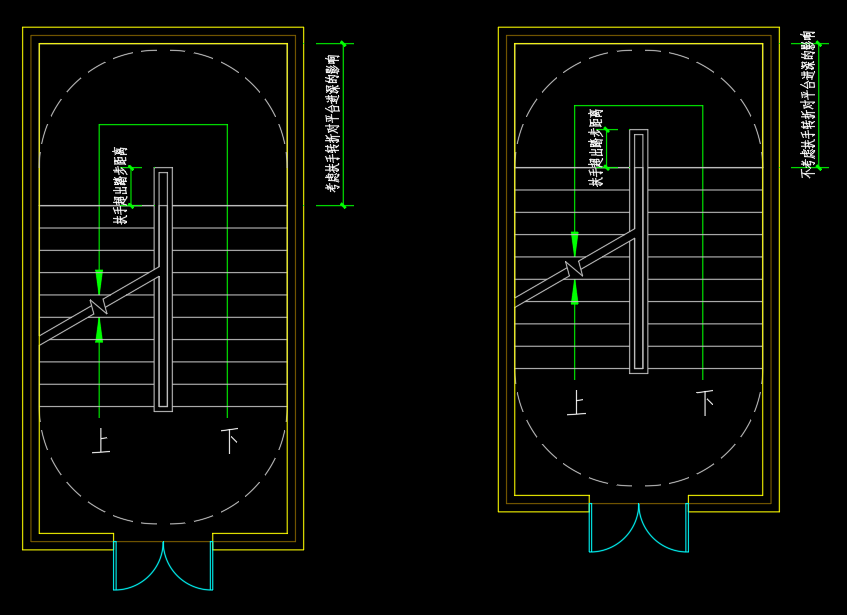
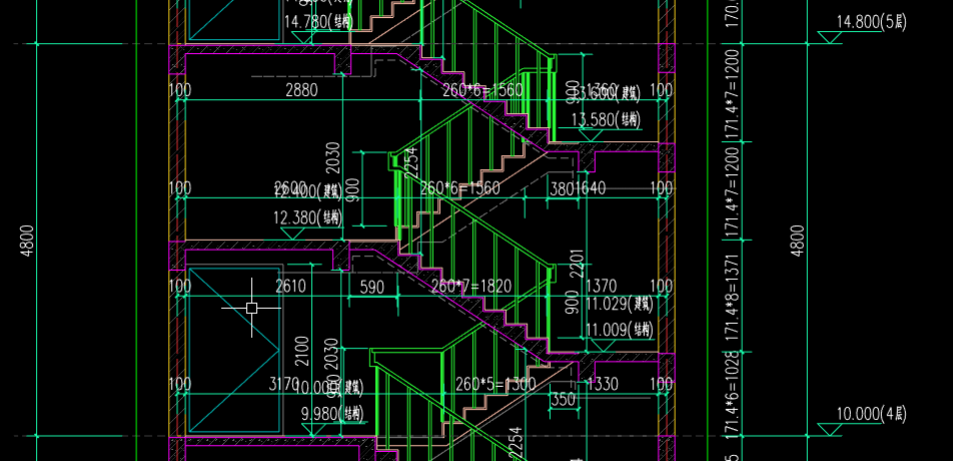
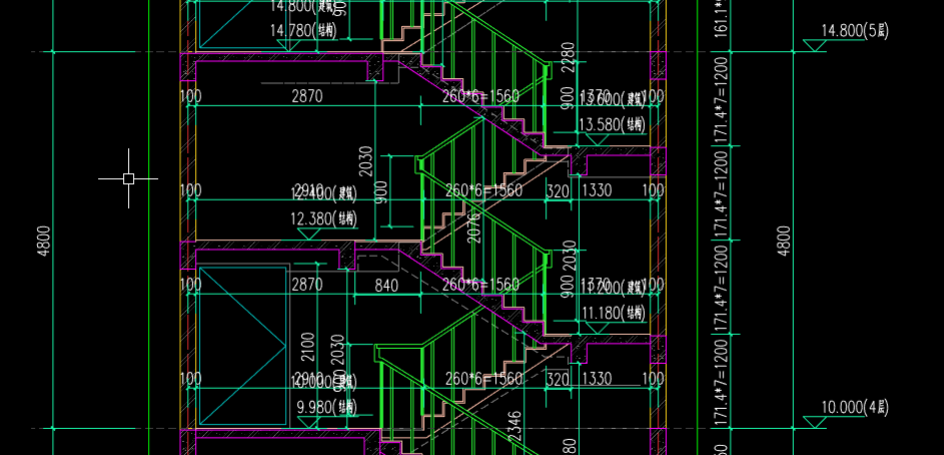
图12-考虑扶手转折对平台进深的影响(左图)、不考虑扶手转折对平台进深的影响(右图)
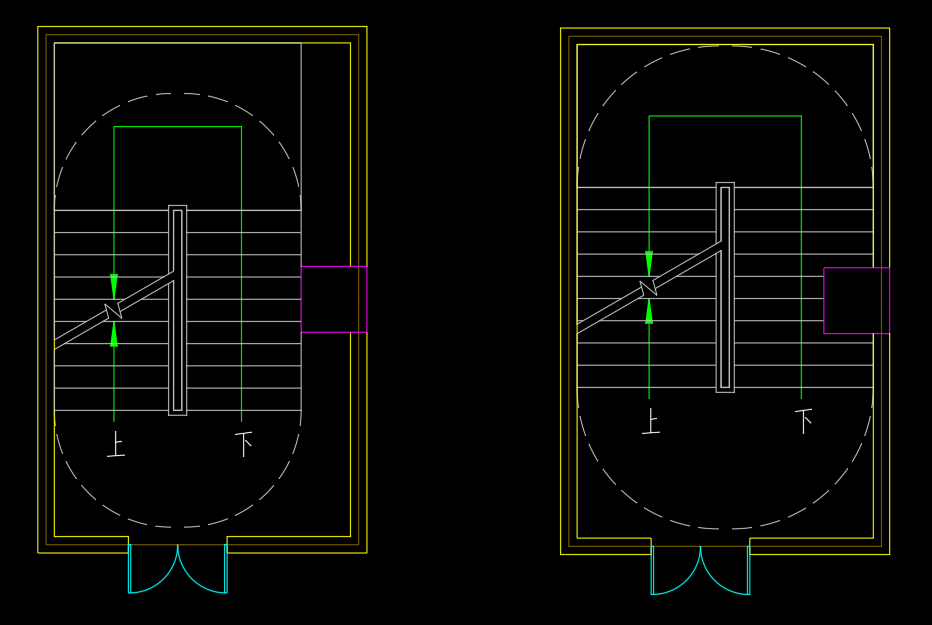

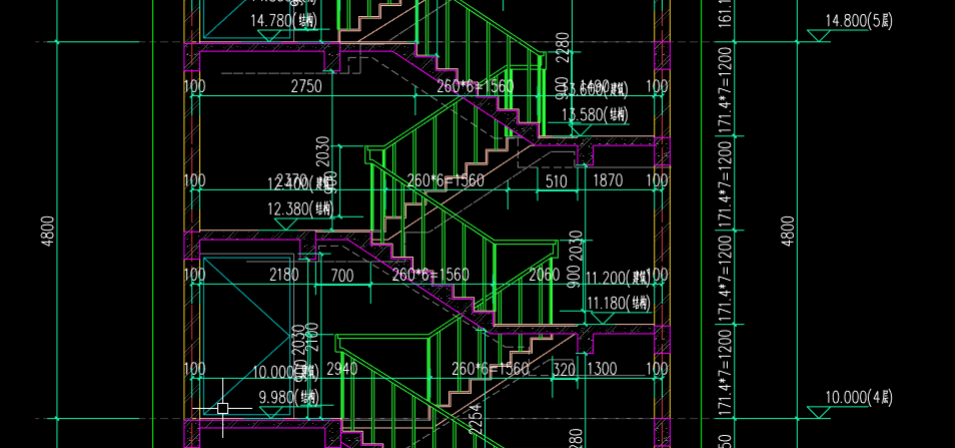
图14-梯段对齐方式的参数选项
用户通过这个配置项,既能得到更符合施工习惯的十位数为“0”的平台进深,也可以单纯得到更舒适宽敞的平台进深。
-
严格按照用户设定的排布目标得出的排布区域进行排布。 -
若局部发生疏散半径碰撞或碰头,可调整梯段相对位置。
-
严格按照用户设定的排布目标得出的排布区域进行排布,并按照跑数结论均分梯段。 -
按照用户选择平台对齐的一侧进行对齐,并遵守这个平台进深的限制。
-
严格按照用户设定的排布目标得出的排布区域进行排布,并按照跑数结论均分梯段。 -
按照用户选择平台对齐的一侧进行对齐,并遵守这个平台进深的限制。 -
若局部发生碰头,可调整梯段相对位置
-
严格按照用户设定的排布目标得出的排布区域进行排布,并按照跑数结论均分梯段。 -
按照用户选择平台对齐的一侧进行对齐,并遵守这个平台进深的限制。 -
若局部发生碰头,可调整梯段相对位置或踏步分配


本篇文章来源于微信公众号:%品览pinlan%